並行システムの検証と実装
平成24年度シラバス
2012年1月19日
国立情報学研究所
トップエスイープロジェクト
代表者 本位田 真一
1. 講座名
並行システムの検証と実装
2. 担当者
磯部 祥尚
3. 本講座の目的
並行システムは複数のプロセスから構成されるシステムであり、各プロセスは他のプロセスと通信しながら同時に動作することができる。その通信方式は、共有メモリ上でメッセージを交換する共有メモリ通信方式と、チャネルを通してメッセージを送受信するメッセージパッシング通信方式に大別される(図1参照)。一般に、共有メモリ通信はメッセージパッシング通信に比べて高速であるが、共有メモリ通信による並行システムの動作を理解することは難しく、デッドロックやリソース競合などの不具合が発生する可能性が比較的高い。
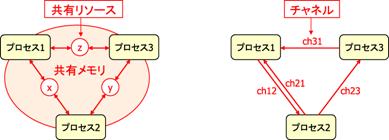
図1 共通メモリ通信(左)とメッセージパッシング通信(右)の構成例
本講座では、信頼性の高い並行システムを構築することを目的として、次の三つのキーワード(CSP, FDR, JCSP)を軸に、CSPによる並行システムのモデル化、FDRによる検証、JCSPによる実装方法について説明する。
|
CSP |
:並行システムを記述・解析するための理論 |
(プロセス代数) |
|
FDR |
:CSP理論に基づく並行システム検証ツール |
(モデル検査器) |
|
JCSP |
:CSPのプロセスモデルの実装ツール |
(Javaライブラリ) |
JCSPはJavaで同期式(送信と受信が同期する方式)のメッセージパッシング通信(CSPの通信方式)を実装するためのライブラリである。同期式であるためメッセージの取りこぼしがなく、より信頼性の高い並行システムを構築することができる。さらに、JCSPプログラムからCSPの通信部分を抽出し、モデル検査器FDRによってその並行動作を検証することも可能である。尚、本講座では次の用語を用いる。
|
CSPモデル |
:並行システムのCSP記述(形式的な記述) |
|
FDRスクリプト |
:モデル検査器FDRで読込み可能な記述(FDR入力言語) |
|
JCSPプログラム |
:ライブラリJCSPを利用しているJavaプログラム |
4. 本講座のオリジナリティ
JCSPはCSP理論の試験的な実装ではなく、実際のシステム開発に利用できるほどの性能を有している。しかし、残念ながらJCSPプログラミング技法を習得できる機会は極めて少ない。また、JCSPの基礎になっているプロセス代数CSPやその検証ツールFDRについても、オートマトンやその検証ツール(SPIN等)に比べると学習する機会は少ない。本講座では、プロセス代数によるモデル化の特徴を紹介しつつ、その特徴を活かした検証方法を解説し、それらに基づくJCSPプログラミング技法を説明する。尚、JCSP (Java)の他にC++CSP(C++), PyCSP (Python), CHP (Haskell)等のCSPライブラリや、GoogleのGo言語のように言語レベルでCSPに基づく並列処理記述が可能なプログラミング言語も公開されており、本講座の開発手法はJava以外のプログラミング言語にも有効である。
表1 既存の講座の問題点と本講座における解
|
本講座における解 |
|
|
並行システムのモデル化にはオートマトンが使われることが多いが、オートマトン理論では、非決定的な動作を適切にとらえられない場合がある。 |
基礎理論にプロセス代数CSPを採用することによって、並行システムの動作をより適切にモデル化することができる。 |
|
一般的なモデル検査器(例:SPIN, SMV)では、実装をオートマトン、要求を時相論理で記述する。すなわち、実装が要求を満たすかを検証する。このような充足関係では部分的な特性を容易に検証できる利点があるが、その一方で全体の動作がどのようになるのかを時相論理だけで記述することは容易ではない。 |
CSPに基づくモデル検査器FDRでは、実装も仕様(要求)も同じCSPでモデル化される。すなわち、実装が仕様の詳細化であるかを検証する。並行システム全体の動作と抽象的な仕様が観測的に等しいことなども検証できる。また、この詳細化関係はプロセスを並行合成した場合も保存されるため、部品単位での検証が可能になるなどの利点もある。 |
|
検証されたモデルができても、それを適切に実装する枠組みがなければ高信頼なシステムを実現することはできない。例えば、オートマトンによる検証と共有メモリ通信による実装のギャップは大きい。 |
JavaのライブラリJCSPを用いることによって、CSPモデルを比較的簡単に実装することが可能になる。逆に、JCSPプログラムから通信部分を抜き出してその動作をFDRで検証することもできる。 |
|
並行システム理論と並列プログラミングは別々に講義されることが多い。 |
理論(CSP)→検証(FDR)→実装(JCSP)の流れを重視し、それぞれの関係に常に注意を払いながら講義を構成している。 |
5. 本講座で扱う難しさ
最近では多くのパソコンがマルチコアCPUを搭載するようになり、そのコア数は2個から4個に移行しつつある。また、48コアをワンチップに実装したSCC(Single-Chip Cloud Computer)の動作デモに成功したとの報告もあり(2009年12月)、今後コア数はさらに増えていくと予想される。従来、パソコンの性能向上は主にCPUの周波数を上げることによって行われ、周波数が上がれば、どのようなプログラムの実行速度も自動的に改善されてきた。一方、マルチコアCPUのコア数を増やしても、プログラムが並列処理に対応していなければ、実行速度の改善は望めない。今後のマルチコアCPUの恩恵を受けるには、何らかの方法で並列処理を実装する必要がある。最近では自動的にプログラムを並列化するツールもあるが、より複雑な並列処理を実現するためには、各プロセスの実行のタイミングをプログラマが適切に記述する必要がある。しかし、並列処理ではデッドロックやリソース競合のような不具合が発生する可能性があるため、その全体の動作を適切に予測し、個々のプロセスを制御することは容易ではない。
6. 本講座で習得する技術
本講座では、CSPの通信・並行処理モデル(同期式メッセージパッシング通信)に基づくJCSPプログラミング技術を身につける。共有メモリ通信を使った並行プログラミングと比較し、どのプロセスがどのタイミングで同期(通信)するのかが分かりやすくなり、より安全で簡潔なプログラムが書けるようになる。
JCSPを使うことでデッドロックのようなバグの発生率を低くすることができるが、それでも複雑な並行動作を完全に把握することは難しい。本講座では、CSPのモデル検査器FDRによる検証技術も身に付け、JCSPプログラムの信頼性をさらに高める方法を習得する。そのために、FDRスクリプトとJCSPプログラムの違いを適切に理解し、FDRスクリプトからJCSPプログラムへの変換ができるようにする。
FDRはCSP理論に基づくモデル検査器である。本講座では、FDRでどのような等価関係や詳細化関係を検証しているのかを理解できるようにCSP理論についても説明する。これにより、FDRの検証機能を適切に使えるようになるだけでなく、検証結果が偽の場合の反例をより理解できるようになる。
以上、CSPによるモデル化、FDRによる検証、JCSPによる実装の方法を身に付けることにより、信頼性の高い並行システムの開発が可能になる。
7. 前提知識
本講座の受講生はJavaプログラミングの基礎知識を有すること。FDRはLinux上で動作するため、Linuxの基本的なコマンドを使えることが望ましい。並列プログラムやプロセス代数についての前提知識は必要ない。
8. 講義計画
本講義では、CSP理論、FDR検証、JCSP実装を個々に教えるのではなく、可能な限り、CSP→FDR→JCSPの流れを重視して教えることを一つの特徴にしている。その特徴を活かせるように、講義計画はそのパターン(CSP→FDR→JCSP)を繰り返して、個々ではなく全体として徐々に詳しい説明をするように構成されている(図2参照)。
・
概要
第1,2回:CSP, FDR, JCSP概論 (並行システムのモデル化、検証、実装の概要)
第3,4回:CSP入門 (モデル化の基礎)
第 5回:FDR入門 (検証の基礎)
第6,7回:JCSP入門 (実装の基礎)
第8回:CSP理論 (並行動作の表現)
第9回:CSP理論 (並行動作の解析)
第10回:FDR検証 (検証とデバッグの例)
第11回:JCSP実装 (共有チャネル、ネットワークチャネル)
第12回:CSP, FDR, JCSP応用 (チャネル渡し、抽象化)
第13週:グループ討論 (グループ課題設定:並行システム)
第14週:グループ実習 (作業:並行システムのモデル化、検証、実装)
第15週:グループ発表 (発表:並行システムのモデル化、検証、実装)
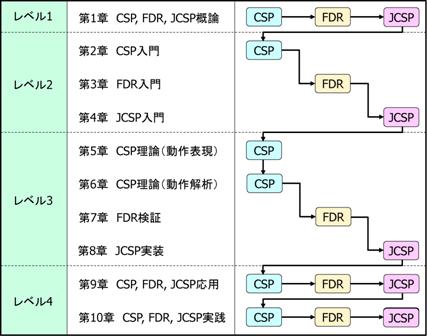
図2 配布予定の講義テキスト(随時配布)の章立て
・
詳細
第1,2回:CSP, FDR, JCSP概論
Ø
簡単な例による、モデル化、検証、実装の概要
Ø
演習:各ツールの動作確認
第3,4回:CSP入門
Ø
CSPによる並行プロセスの記述
Ø
演習:CSPモデルの記述
第5回:FDR入門
Ø
FDRによる並行プロセスの記述
Ø
演習:FDRによるデッドロック解析
第6,7回:JCSP入門
Ø
CSPモデルからJCSPプログラムへの変換方法
Ø
演習:JCSPによう並行プログラミング
第8回:CSP理論(動作表現)
Ø
並行動作の状態遷移図による表現方法
Ø
演習:補助ツールProBEによる遷移の確認
第9回:CSP理論(動作解析)
Ø
並行システムの等価関係や詳細化関係
Ø
演習:詳細化仕様の作成
第10回:FDR検証
Ø
FDRによる詳細化関係の検証とデバッグ方法
Ø
演習:詳細化関係の検証
第11回:JCSP実装
Ø
共有チャネルとネットワークチャネル
Ø
演習:JCSPによるネットワークプログラミング
第12回:CSP, FDR, JCSP応用
Ø
より高度な検証と実装テクニック
Ø
演習:グループ作業の準備
第13回:グループ討論
Ø
グループ発表のための課題(並行システム)の討論
第14回:グループ実習
Ø
グループ発表のための実習(モデル化、検証、実装)
第15回:グループ発表
Ø
最終発表会(モデル化、検証、実装)
6. 教育効果
本講座を受講することにより、プロセス代数CSPに基づくモデル化、検証、実装の方法を習得できる。理論から実装までの流れを理解することによって、検証された信頼性の高い並行システムを開発できるようになる。
7. 使用ツール
FDR:CSPのモデル検査ツール
・ 使用する上での難しさ
Ø 仕様(要求)のモデルの作成
Ø 詳細化関係の意味
・ 使用上必要なノウハウ
Ø 並行動作のモデル化ノウハウ
Ø 詳細化関係の使い分けノウハウ
・ 選択理由、実用性
Ø CSPモデルの検証に最適
Ø データの高い表現力
JCSP:CSPのプロセスモデルをJavaで実装するためのライブラリ
・ 使用する上での難しさ
Ø 通信チャネルの種類と使い分け
Ø FDRスクリプト(CSPモデル)との違い
・ 使用上必要なノウハウ
Ø 並行システム実装ノウハウ
Ø FDRスクリプト(CSPモデル)からJCSPプログラムへの変換ノウハウ
・ 選択理由、実用性
Ø CSPモデルの実装に最適
Ø ネットワークチャネルを利用して分散処理も簡単に実現可能
8. 実験及び演習
CSP, FDR, JCSP に慣れるために、早い段階から小さな例題をもとに演習を行う。最終的には、3~4名程度のグループをつくり、グループごとに考案した並行システムのモデル化、検証、実装を行う。実際に自分で考えた並行システムを検証し実装することで、検証の有効性を実感することができる。
9. 評価
演習課題レポート、グループ作業・発表、出席日数を総合して評価する。
10. 教科書/参考書
平成19年度の本講義テキスト(サイエンスによる知的ものづくり「並行システムのモデル化、検証、実装」、本位田真一監修、磯部祥尚著)が参考になるが、図2に示したようにその構成や内容を修正している。本講義期間中、講義で使用するスライドの他に、最新版のテキストを随時配布する。その他、CSP, FDR, JCSPの参考文献をあげておく。
·
A.W.Roscoe. The Theory and
Practice of Concurrency. Prentice Hall, 1998. 代表的なCSP理論の教科書であり、検証ツールFDRについても説明がある。
http://web.comlab.ox.ac.uk/oucl/work/bill.roscoe/publications/68b.pdf
からダウンロード可能。
·
Failures-Divergence Refinement
(FDR2 User Manual), 2005. FDRをインストールすると添付されているマニュアル。基本的な操作方法や構文が書かれている。
http://www.fsel.com/documentation/fdr2/fdr2manual.pdf
からダウンロード可能
·
残念ながらJCSPの教科書的な文献はないが、下記のJCSPのウェブサイトではJCSPに関する様々な情報を得ることができる。
http://www.cs.kent.ac.uk/projects/ofa/jcsp/
尚、下記ウェブサイトにて、FDRとJCSPのインストール方法を説明しているので参考にしてほしい。
本講座の補足ウェブサイト:http://staff.aist.go.jp/y-isobe/pw/topsevic2009/
付録1
本講座で習得する並行システムのモデル化、検証、実装の特徴を、図3の並行挿入ソートの例ParSortを用いて簡単に紹介する。初期状態では、この挿入ソートは2つのプロセス ManagerとTermSortから構成されている。図3(a)に示すように、これらのプロセスは次の手順で接続されている。
1. TermSortの2つのチャネルdataLとretLを各々dataRとretRに名前変更する。
2. TermSortとManagerをチャネルdataRとretRを通して並行合成する。
3. チャネルdataRとretRを外部から隠す。
プロセス ManagerはチャネルdataRにデータ(乱数整数)を繰り返し送信し、TermSortはそのデータを受信して順次挿入ソートする。ただし、TermSortは自分がソートするデータ数が上限値Mを超えると、ソート作業を分業するために新しくプロセス Sortを生成する。この動作はManagerから整数が送信される限り続けられるため、その構造は図3(b)(c)のように徐々に変化する。Managerから終了信号が送信されると、ソート結果がチャネルretRを通してManagerに返信され、最後にチャネルdispを通して外部に送信される。
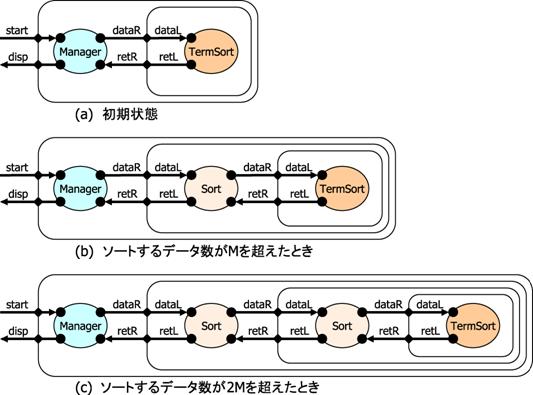
図3 並行挿入ソートParSortの構造(M:1つのプロセスが処理する最大データ数)
この並行システムとその仕様のFDRスクリプト(CSPモデル)を作成し、実際にFDRで検証した結果を図4に示す(データ数5, データ変域{0,1}, 各ソートプロセスのデータ数の上限(M)2, 検証時間約2分、Pentium-M, 1.5GHz, 768MB RAM)。ここで、Specはstart後に(いつか)必ずdisplayチャネルからソートされたリストが出力されることを要求する仕様である。図4の中央左の1番目の✔がParSortがデッドロックフリー(DF)であること、2,3番目の✔がParSortとSpecは等しくなることを表している。
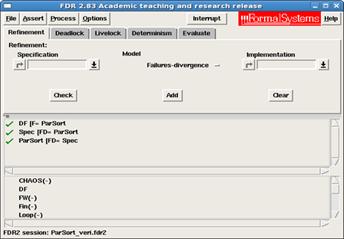
図4 FDRによる挿入ソートの検証結果
また、図3の並行挿入ソートParSortをJCSPで実装し、ソートプロセスの数を1から15まで増加させた時のソート処理時間(データ数400,000)を図5に示す。使用したパソコンは4コアCPUを搭載している(Intel Core 2 Quad Q9550 CPU, 2.83GHz, 2GB RAM )。プロセス数を増加させることによって4つのコアが有効に使われ、ソートプロセス数が15個のときは1個のときよりも処理時間が約70%減少している(4コアであるので理想は75%の減少)。この挿入ソートの例では、ソート開始直後はTermSortプロセスのみがソート処理を行うため、複数のコアを有効に利用できない。プロセス数を増やして(上限値Mを下げて)早い段階で処理が新しいソートプロセスが生成されるようにすることによってソートが並列に行われるようになり、その処理時間が短くなる。尚、400,000のデータを全く並列化せずに(JCSPを使わずに)、逐次処理で挿入ソートしたときの処理時間は140秒程度であり、図5のソートプロセス数が1の場合と大差はなかった。
図5 ソートプロセス数とソート時間の関係(4コアCPU、400,000データ)
図6に、(a) ソートプロセス数1、(b) ソートプロセス数4、(c) ソートプロセス数15の場合の、各々のソート(400,000データ)中のCPU使用率の履歴(タスクマネージャーProcess-Exploreによる)を示す。逐次処理(ソートプロセス数1)では1つのコアしか使用できないため、そのCPU使用率は(4コアに対して)25%程度になっている。ソートプロセス数が4の場合にCPU使用率が時間と共に徐々に増加する理由は、ソートするデータ数と共にその処理の並列度が増加するためである。ソートプロセス数15の場合は、早い段階から4つのコアを有効利用できるようになるため、全体のCPU使用率も増加している。
この挿入ソートの例では、ソートプロセス数とチャネル数がデータ数に応じて増加し、その構造が動的に変化する。このような並行システムを正しく設計することは容易ではないが、その動作をFDRで検証することによって、実装前にバグを発見することができる。また、JCSPではその検証済みのCSPモデルを実装できるため、信頼性の高い並行システムを構築することができる。
本講座では、ここで紹介した並行挿入ソートのCSPモデル、FDRスクリプト、JCSPプログラムを作成するために必要なテクニックを一通り紹介している。この機会に本講座を受講してCSP, FDR, JCSPを習得してほしい。最後に、CSPモデルを実装可能なライブラリとプログラミング言語の例を表2にまとめておく。
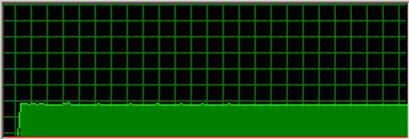
(a)
ソートプロセス数1(処理時間148秒)
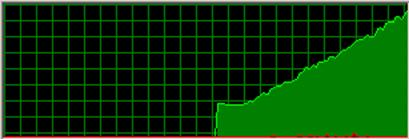
(b)
ソートプロセス数4(処理時間72秒)
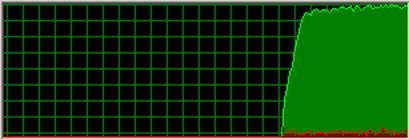
(c)
ソートプロセス数15(処理時間47秒)
図6 挿入ソート(400,000データ)実行中のCPU使用率の履歴
表2 CSPライブラリとプログラミング言語
|
言語 |
ライブラリ |
関連URL(ダウンロード可能) |
|
Java |
JCSP |
http://www.cs.kent.ac.uk/projects/ofa/jcsp/ |
|
C++ |
C++CSP |
http://www.cs.kent.ac.uk/projects/ofa/c++csp/ |
|
Haskell |
CHP |
http://www.cs.kent.ac.uk/projects/ofa/chp/ |
|
Python |
PyCSP |
http://code.google.com/p/pycsp/ |
|
Python |
Python-CSP |
http://code.google.com/p/python-csp/ |
|
Go言語 (Google) |
http://golang.org/ |
|
|
XC (XMOS) |
http://www.xmos.com/jp |
|